
iRobot Roomba 780: месяц жизни в наступившем будущем.
<br/>Робот-пылесос.<br/>Куплен здесь.<br/>Решил написать этот отзыв, мини-review в ответ на бешенную рекламу всех девайсов данного типа и в связи с большим интересом множества людей к вопросу. Ну и в связи с тем, что по сети гуляет тьма хвалебных отзывов, куча забавнейши роликов, а те отзывы, что не хвалебны, ограничиваются, как правило, несколькими ругательствами, не более.<br/>Взял этот. Вообще, «думал» просто: берём топовую модель – и не паримся.<br/>Ещё мысль: фирма была одной из первых, кто этим начал заниматься более-менее на профессиональной основе, а не просто –«баловаться». Добавило уважения, что фирма, в осн...
реклама
Робот-пылесос.
Куплен здесь.
Решил написать этот отзыв, мини-review в ответ на бешенную рекламу всех девайсов данного типа и в связи с большим интересом множества людей к вопросу. Ну и в связи с тем, что по сети гуляет тьма хвалебных отзывов, куча забавнейши роликов, а те отзывы, что не хвалебны, ограничиваются, как правило, несколькими ругательствами, не более.
Взял этот. Вообще, «думал» просто: берём топовую модель – и не паримся.
Ещё мысль: фирма была одной из первых, кто этим начал заниматься более-менее на профессиональной основе, а не просто –«баловаться». Добавило уважения, что фирма, в основном, делает роботов для армии и полиции.
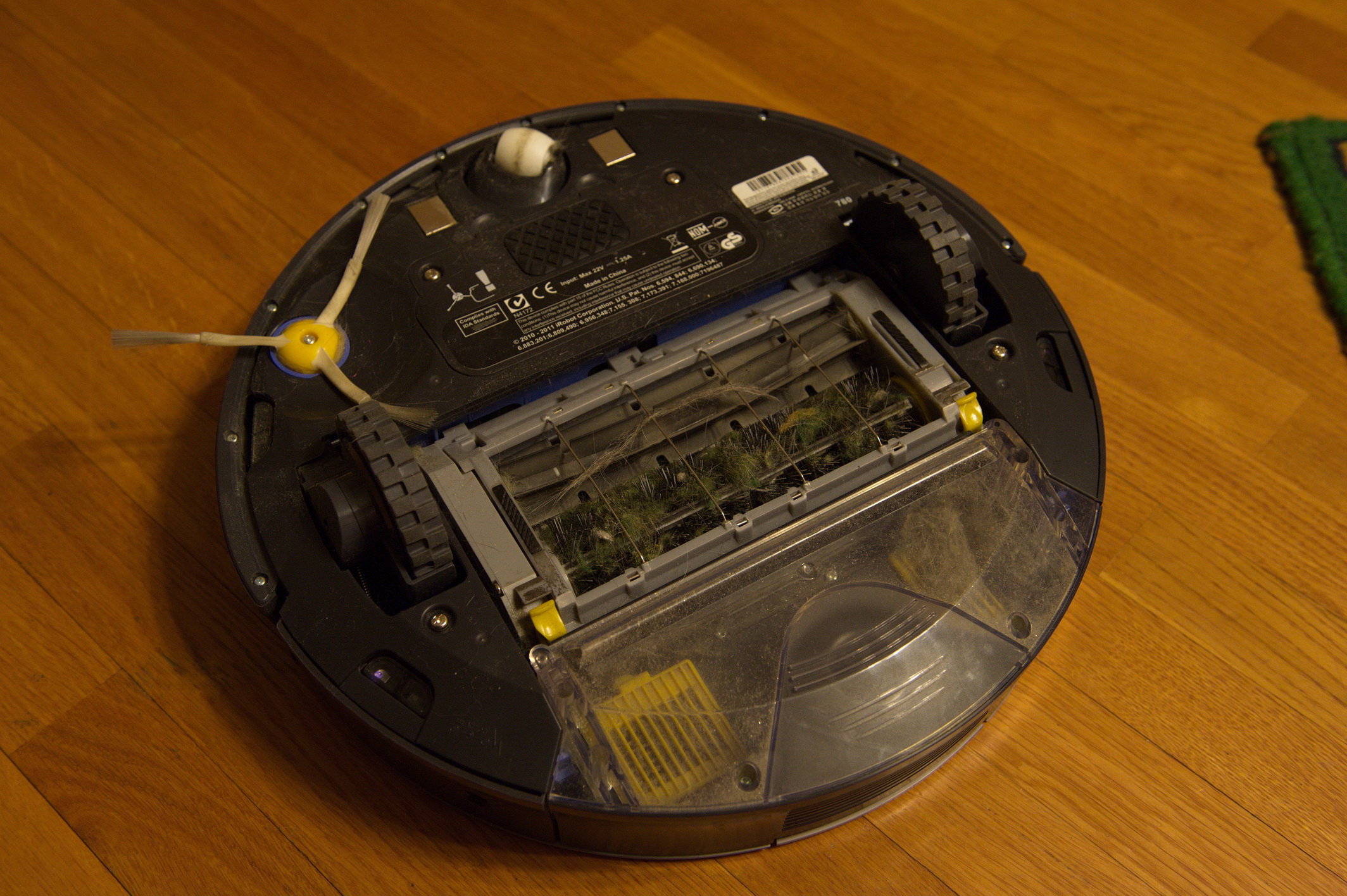
Конструктив: девайс представляет собой круглую "шайбу" с "мозгами", портом для программирования на верхней поверхности (для этого потребен спецдевайс, приобретаемый отдельно) и панелью управления. С панели можно настраивать некоторые вещи и запускать-выключать девайс вручную (он ещё может работать по несложной программе, с настраивыми параметрами времени уборки). Настройка проста, в этом нет трудностей. Имеется так же пульт, типа как для телевизора - чтоб не наклоняться, ну а заодно можно с пульта пылесос гонять по комнате в мануальном режиме. Ещё наверху есть "фонарик" ИК-приёмника, которым девайс, как понимаю, определяет положение кормушки и виртуальных стен-маяков. Спереди девайса бампер - надо сказать, к некоторым препятствиям робот подъезжает аккуратно (шторы, стены), но в некоторые - с разбега. Сзади - решётка выхода воздуха пылесоса. С пуза - пара моторизованных колёс, позволяющих бегать по прямой, имея две скорости движения, разворачиваться вокруг одного заторможенного колеса, поворачивать с радиусом, задаваемым малой скоростью вращения внутреннего колеса и большой скоростью - внешнего, а так же - на одном месте, за счёт работы двигателей колёс в разные стороны. За счёт реверса обоих двигателе возможно обратное движение аппарата. Кроме того, снизу видно устройство "электровеника". Спереди-сбоку видны окошка датчиков препятствий. Такие же дачики с сзади-сбоку, но расставлены они пошире. С одной стороны сбоку-спереди - щётка, метущая углы. Сзади-снизу - контейнер для мусора со встроенным "пылесосом" - через прозрачный корпус видны пара квадратов фильтров. Размер девайса позволяет ему пробраться меж ножек среднестатистического стула (однако, это малореально из-за тупой программы и ограниченной радиусами поворота маневренности).
Реальность: дорогая штука. Пылесосит в самом деле сама. Пылесосенье заключается в том, что ездит она почти хаотически (хотя элементы запрограммированных траекторий прослеживаются, как и смена их) и заметает одной из щёток под себя мусор – щёткой же метёт углы и края. А весь собранный мусор подхватывается «ёршиком» под пузом + щёткой с резиновыми пластинчатыми лопастями и отправляется в контейнер на попе, в который вмонтирован уже пылесос – слабенький, замечу. Основное назначение этого сосущего агрегата, как я понимаю – это подобрать мусор с щёток и не давать ему вывалиться обратно. Мелкая пыль задерживается на многоразовых моющихся фильтрах, похожих на гофрированную бумагу. Их видно с брюха – в прозрачном контейнере, пара квадратиков.
Сказать, что аппарат прям сразу всю пыль соберёт – таки нет. Но он способен тупо колесить по комнате час-полтора и за это время проедется по каждому месту по несколько раз и соберёт всё. При наличие ковра + кошки (которая его дерёт) качество подбора всего, что понавыдирала кошка из старого ковра – нормальное. С паркета – само-собой нормально, с кафеля – тоже.
Фактически, по способу сбора мусора – это подметальщик, робовеник. Пылесосом оно является с большой-большой натяжкой. Вакуумной уборки здесь не будет, очистка от мусора механическая. Хотя не всё ли равно, если результат – нормальный?
Применение: реально, с учётом того, что организовать самостоятельное перемещение по квартире робота проблематично, надеяться на полностью-автоматическую уборку – не приходится. Реально – это организуются более-менее простой конфигурации зоны, ограничиваемые «виртуальными стенами» и в них робот трёт полы щёткой своей. Теоретически робот может с помощью универсальных устройств «электронная стена – маячок» (в зависимости от настройки их) ползать по всей квартире и нескольким комнатам. Практически, для организации этого потребуется более, чем два вспомогательных навигационных устройства: чтобы робота не пускать к кошачьей миске, к примеру и к компу (чтоб не бился о корпус, что не полезно для HDD и не жрал провода), чтоб не прыгал в ванную и туалет, чтоб направить в следующую комнату и так далее. А в комплекте их всего два. По моим прикидкам, мне надо в конкретную квартиру дополнительно 4-5 «виртуальных стен-маяков». Они дорогие в России, но их можно купить на Ebay. Второе препятствие – это что на комнату уходит около часа-полутора, с учётом реальной конфигурации. Это до половины заряд робота. Так что надо в комнатах ещё и «кормушки» расставлять. Третье препятствие, которое вообще непреодолимо – ножки стульев. Он в них путается иногда, а чаще – просто не пролезает и там оставляет нечищеное пространство. Так что их надо самому выносить. С одним стулом ещё справляется, но если их несколько сбилось в стаю – беда… Или заблудится среди ножек и погибнет от голода там, или, скорее – просто потыкается о частокол ножек и побежит дальше. Тупой алгоритм и две скорости движков не позволяют объезд препятствий по произвольному (актуально в этой ситуации - малому) радиусу – а по большому робот неизбежно натыкается на следующую ножку. Так и бегает вокруг стульев. То же самое с ступенькой вниз – ванная комната и туалет, где уровень пола – ниже. Робот не отслеживает такого рода препятствия и весело прыгает, естественно, ложась брюхом на ребро супеньки и уборка на этом закончена.
Таким макаром, работа заключается в запирании робота с парой «виртуальных стен», ограничивающих его перемещение по комнате или коридорам, на часок. Потом заносим стулья и после зарядки батареи (или, если остался заряд – без зарядки) – запираем в следующей комнате…
Так как объём мусоросборника невелик, то правило простое: одна комната – одно вытряхивание контейнера. Теоретически, он сам, автоматом должен чистить всё каждый день, что и грязи не должно много быть, но так как практически эта функция не может быть задействована (из-за малой автономности, необходимости больших вложений в навигацию и выноса стульев), то запуск робота – в ручном режиме и не очень часто. Потому объём его мусорки – становится критичен.
Из всего вышесказанного следует простая мысль: тупой робот не будет менее эффективен, чем с навороченной (якобы) программой передвижения. Платить за виртуальные стены в комплекте – тоже не резон. Хватит одного-двух устройств с функцией только стены, а маяк – не нужен. Потому топовая и самая дорогая комплектация – не обязательна.
Мой девайс уже успел где-то покорябаться. В общем, на работе не сказывается. Для эстетов – можно заменить корпус. Мне – всё равно. Шумит довольно-громко и назойливо, постоянно тычется в стулья, путается под ногами. Так что лучше не находиться в одном помещении с ним.
Так как бОльшую часть мусора сметает сам – по недоступным углам особо и не накапливается.
Надо двусторонним скотчем крепить к полу «кормушку»: голодный робот очень аккуратно на неё забирается, обнаружив, очень аккуратно сползает нажравшись с неё, а потом… бодро запинывает её подальше, в угол, когда идёт на работу. Ну и не может уже заползти на неё после. Вариант: сделать подставку-щит, чтоб робот, заползая на кормушку, уже был двумя ногами и на щите, а кормушку намертво к щиту прикрепить. Чтоб не делась уже никуда.
Итого: прикольная игрушка. Не исключает ручного труда по подготовке помещения к уборке. Другие варианты роботов (LG VR5901LVM/LG HOM-BOT, к примеру), использующие другие датчики навигации и иные программы действий могут быть интереснее, возможно. Более-тупые роботы (Karcher RC 3000/Siemens VSR 8000) не будут менее эффективны, вероятно, зато у них есть станция для зарядки с бункером для мусора. Более-дешёвые модели iRobot не будут серьёзно уступать ничем старшей модели, вероятно, за вычетом непонятных понтов, польза от которых неочевидна. Разумной формой робота (в плане) следует считать круглую: все, имеющие прямоугольную/квадратную конфигурацию идут лесом: робот о двух колёсах и разворачивающийся на месте противовращением их, неизбежно будет цеплять окружающие предметы при развороте и не сможет бегать по углам и узким "тупичкам", застревая, как это должно иметь место в моделях, типа Mint 4200 Automatic Floor Cleaner и Neato XV-11. Всё же, диагональ квадрата - в 1.7 раза больше, чем сторона квадрата, так что заехав в узкий проход робот там не сможет развернуться.Также не должно быть никаких выступающих деталей - по аналогичным причинам. Имеет смысл сделать на робота дефлектор, отклоняющий вверх поток выбрасываемого сзади воздуха - чтоб не гонял струёй пыль (выброса воздуха вверх штатно нет ни на одной популярной моделе пылесоса!) на поворотах. Пылесос "от самсунгов" идёт по этой причине лесом:
я никак не мог понять: отверстия для всасывания есть, а для выхода воздуха нет! Прям инопланетная технология какая то- связь с четвертым измерением! Пришлось разобрать, чтоб понять в чем дело (интересно же, как НЛО устроено ;). Ну да, опасения были не напрасны: у него нет (слышите, НЕЕЕТ) отверстий для выхода всосанного воздуха! Воздух, пройдя через фильтр, всасывается прямо в корпус (прям туда, где все электронные платы!), и выходит через случайные щели спереди пылесоса (снизу бампера). Таким образом, воздух почти не выходит, а тот, что выходит, сдувает и поднимает пыль еще до того, как пылесос к ней подъехал своим пылесборником. И всасывает потом он только то, что не смог до этого сдуть! Ну не бред, а? Пришлось в красивой синей "спине" прорезать два отверстия и вставить туда декоративные решеточки (естественно, нарушив гарантию, но я, пардон, по другому не смог). И, о, чудо! - пылесос вдруг начал собирать пыль, а не разгонять её по комнате.
- Это не мой девайс, я его не курочил! У меня Самса в хозяйстве нет! Это цитата из камента к сабжу на Яндекс-Маркете, и человека, так надругавшегося над гнусмасовским пылесосом я не знаю и в родстве не состою, ровно как и в близком знакомстве (однако уважаю, как оверклокера пылесосов).
P.S. Если хочется картинок "почти в оригинале" - кликнуть "Свойства" и скопировать ссылку на картинку - и открыть в отдельном окне. Клик на саму картинку на нынешней итерации "Персональных страниц" не открывает в соседнем окне или ещё как картинку в оригинале...



Теги
Лента материалов
Правила размещения комментариев
Соблюдение Правил конференции строго обязательно!
Флуд, флейм и оффтоп преследуются по всей строгости закона!
Комментарии, содержащие оскорбления, нецензурные выражения (в т.ч. замаскированный мат), экстремистские высказывания, рекламу и спам, удаляются независимо от содержимого, а к их авторам могут применяться меры вплоть до запрета написания комментариев и, в случае написания комментария через социальные сети, жалобы в администрацию данной сети.