
БПЛА блока НАТО, их возможности и слабые места (часть 1)
Материала очень много, поэтому пришлось разбить статью на две части. В первой части будет классификация БПЛА, всё их многообразие, как по габаритам и назначению, так и по дальности и времени полёта. Я понимаю, что это не совсем компьютерная тематика, но компьютеры есть во многих моделях это раз, и в случае мобилизации вам наверняка придётся с ними столкнуться, либо управляя ими, либо скрываясь от них. БПЛА Avenger (США)
БПЛА Avenger (США)
Классификация БПЛА по лётным характеристикам
Дроны разделяют как по способу их применения и различиям конструкции, так и по взлётной массе, дальности полёта, его высоте и продолжительности, а также по габаритам аппаратов.
реклама
Приведу наиболее распространённую и полную на мой взгляд классификацию для уже созданных, и только разрабатываемых моделей беспилотников (в РФ есть своя классификация, более узкоспециализированная, её мы рассматривать не будем). Данная классификация появилась примерно в 2000 г. и многократно дополнялась. Также существуют необычные модели БПЛА с нестандартными комбинациями характеристик, и их будет трудно определить в один конкретный класс.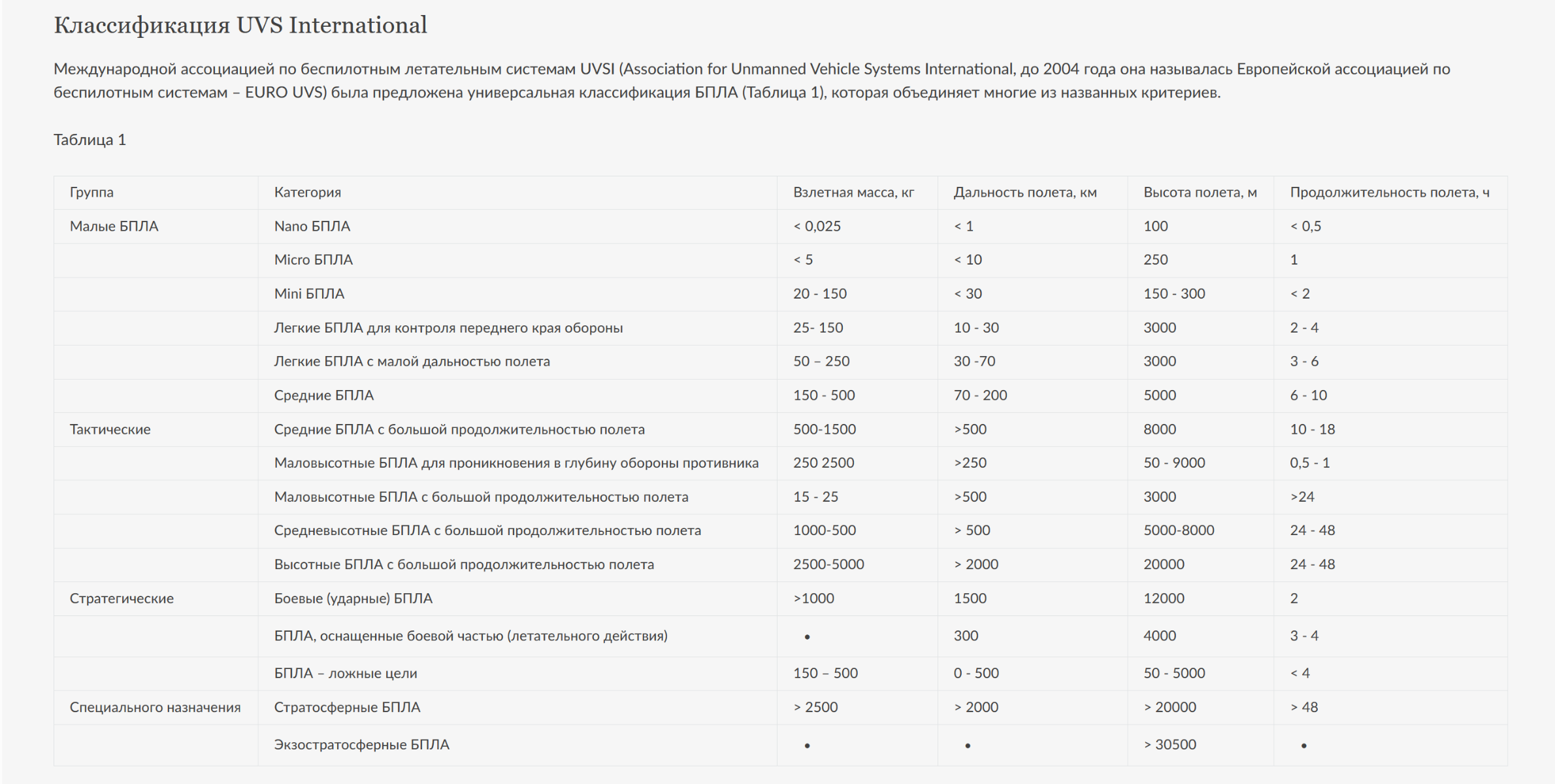
Классификация беспилотных летательных аппаратов по их конструкции
На сегодня создано огромное количество разных моделей БПЛА, разработанных под разные задачи и сильно различающиеся по конструкции. Рассмотрим наиболее известные типы конструкций, получившие наибольшую популярность и доказавших своё превосходство среди остальных.
Прежде всего различают 4 типа БПЛА, разных, как по назначению, так и по конструкции, принципу работы, и взлету/посадке:
- Беспилотники самолётного типа.
- Мультироторные аппараты.
- Модели аэростатического типа.
- Беспилотные конвертопланы и гибридные модели.
реклама
Разберём подробнее каждый из них.
БПЛА самолетного типа
Также они известны также как БПЛА с жёстким крылом (fixed-wing UAV). У таких беспилотников подъёмная сила создается аэродинамическим способом благодаря давлению воздуха на неподвижное крыло. Такие модели обычно отличаются большой продолжительностью полёта, поднимаясь на максимальную высоту на высокой скорости.
Дронов самолетного типа очень много, различаются они по форме крыла и фюзеляжа. Поскольку большинство схем компоновки самолёта и типов фюзеляжей, используемых в пилотируемой авиации, применимы и для беспилотной.
 |
 |
 |
На фото показан экспериментальный многоцелевой самолёт Proteus, от компании Scaled Composites (США). Существуют пилотируемый и беспилотный варианты данного самолёта. Его отличительной особенностью стала тандемная схема расположения крыльев. Длина аппарата 17,1 м, размах задних крыльев 28 м, максимальная высота 16 км (при нагрузке 3,2 т), взлетная масса 5,6 т, максимальная скорость 520 км/ч (измерялась на высоте 10 км). Продержаться в полёте он может до 18 часов. Поднимают его в воздух пара турбореактивных двигателей с тягой по 10,2 кН.
 |
 |
 |
реклама
На фото показан разведывательный беспилотник RQ-4 Global Hawk, разработанный Teledyne Ryan Aeronautical (США), входящей в Northrop Grumman. Дрон имеет необычную форму фюзеляжа, а отсутствие кабины с пилотом, позволило разместить в носовой части радиолокационное, оптическое и связное оборудование. Один из плюсов подобных БПЛА в отсутствии необходимости перевозить пилота в тяжёлом костюме, его кресло с механизмом катапультирования, запас провизии на случай долгого полёта. Корпус дрона выполнен из композитных материалов на основе углеволокна и алюминиевых сплавов, при длине 13,5 м, размах крыльев достигает 35 м. Имея взлётную массу 15 тонн, беспилотник может переносить до 900 кг полезной нагрузки. RQ-4 Global Hawk способен летать до 30 часов на одной заправке, поднимаясь на высоту до 18 км. Его турбореактивный двигатель с тяговым усилием 34,5 кН развивает скорость до 640 км/ч.
 |
 |
 |
 |
 |
 |
Далее показан нестандартный боевой палубный беспилотник Х-47В от Northrop Grumman (США). По форме он напоминает распиаренный Стелс (Lockheed F-117 Nighthawk). Запуск с корабля сильно повлиял на конструкцию дрона. Так его крылья могут складываться, чтобы умещаться на палубе авианосца, имея длину 11,6 м, размах крыльев 18,9 м, (а в сложенном состоянии всего 9,4 м), весит он 6,3 т, максимальная взлетная масса составляет 20,2 т. Турбореактивный двигатель от Pratt amp. Whitney (Канада) разместился в задней части дрона и обеспечивает скорость полета 900 км/ч. Радиус работы БПЛА составляет 3900 км, а максимальная высота 12,2 км. В воздухе он сможет проводить до 80 часов (более 3 суток), ожидается, что будет возможность дозаправки в воздухе, чтобы максимально увеличить длительность полёта.
Для полёта БПЛА самолетного типа чаще всего используют тянущие или толкающие винты, либо импеллеры (impeller, ducted fan, shrouded propeller), что представляют из себя лопаточные машины в цилиндрическом кожухе. Самые скоростные дроны оснащены реактивными двигателями.
 |
 |
 |
 |
 |
 |
Для дронов самолетного типа как правило требуется взлётно-посадочная полоса (далее ВПП) или стартовые катапульты. Но имеются беспилотники запускаемые с руки, их можно отнести к легкому классу. Для посадки также необходима ВПП, специальный тормозной парашют, либо уловители (тросы, сетки или растяжки), применяемые для традиционной палубной авиации с пилотами.
реклама
Минусом беспилотников самолетного типа стала сложность взлёта и посадки, для которых требуются ВПП, устройства запуска и посадки. Поэтому прогресс пошёл в сторону нетрадиционных схем БПЛА, позволяя получить безаэродромные аппараты. Например, самолёты вертикального взлёта и посадки (VTOL, Vertical Take-Off and Landing), далее СВВП. Сейчас представлено множество их представителей, являющихся гибридами самолётов и вертолетов. Так многие СВВП, приводятся в движение реактивным двигателем, импеллером или небольшими пропеллерами. Их условно разделяют по положению фюзеляжа при взлёте и посадке на дроны с вертикальным положением фюзеляжа или тэйлситтеры (tailsitter) и традиционным горизонтальным.
 |
 |
 |
Тэйлситтеры в стартовом положении как правило опираются хвостовой частью на грунт (могут использоваться небольшие упоры-подставки). При этом в воздух его поднимают тянущие винты, расположенные в носовой части. Посадка и взлет происходят вертикально, а наиболее сложным для СВВП манёвром стал переход с вертикальной фазы полета на горизонтальную и обратно. В этот момент они наиболее уязвимы. У показанного на фото беспилотника SkyTote для управления полётом в этих фазах применяется специальный нейросетевой контроллер.
Не обошлось и без влияния НЛО, так есть особый вид беспилотников с жёстким зонтообразным крылом, созданных благодаря эффекту Коанда. Они совсем не похожи на самолёты, но по принципу полёта больше всего соответствуют именно им.
 |
 |
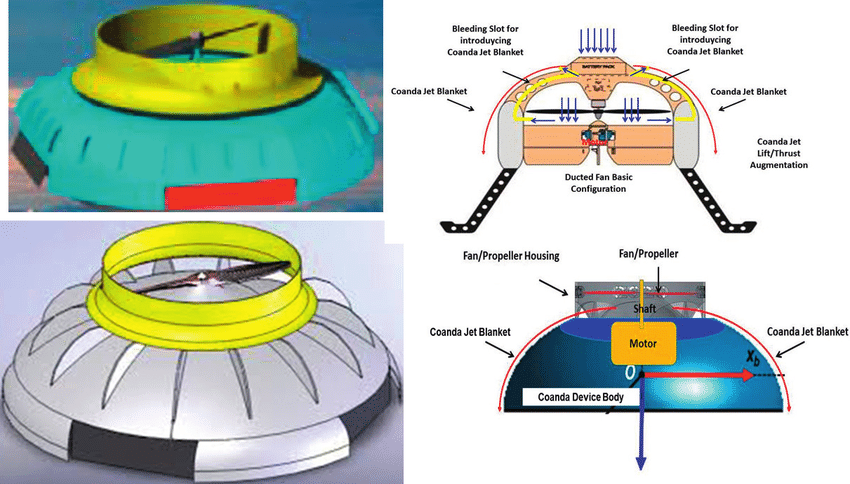 |
Эффект Коанда был открыт в далёком 1932 году румынским ученым Анри Коандэ. Он обнаружил физическое явление, при котором поток жидкости или газа стремится отклониться по направлению к стенке тела с криволинейной поверхностью, а при определенных условиях прилипает к ней, хотя теоретически должен продолжать движение в начальном направлении. Действие эффекта Коанды можно увидеть при подаче слоя воздуха через узкую щель. Он захватывает окружающий его воздух, создавая настилающую струю. При этом, дальность распространения настилающей струи в 1,2 раза больше, по сравнению со стесненной струей (которая ограниченна со всех сторон, как в трубе). Получается, что струя, которая настилается на поверхность, получает большую дальнобойность при прочих одинаковых условиях, чем струя ненастилающая.
БПЛА на эффекте Коанда имеет относительно простое устройство. Над зонтообразной поверхностью монтируется вентилятор или реактивный двигатель, создающий поток воздуха, который выходя через узкую щель, настилает криволинейную поверхность, поднимая аппарат в воздух.
Беспилотники на эффекте Коанда имеют неоспоримое преимущество в городских условиях, лесистой и горной местности, где есть высокий шанс повредит несущий винт. Поэтому эти дроны выигрывают у БПЛА вертолетного типа, поскольку почти не получают повреждений от небольших столкновений с препятствиями. В то время, как для обычного дрона такое столкновение может стать фатальным.
Мультироторные (вертолетные) системы
На сегодня самыми распространёнными беспилотниками стали мультикоптеры. К ним относятся дроны имеющие больше пары несущих винтов. Реактивные моменты уравновешиваются за счет вращения несущих винтов попарно в разные стороны или наклона вектора тяги каждого винта в нужном направлении. Такие мультикоптеры обычно относятся к классам мини- и микро-беспилотников.
Изначально основным назначением мультикоптеров были фото и видеосъёмка различных объектов, и они оснащались управляемыми подвесами для камер. Ими пользовались военные (особенно разведка и пограничники) и тревел-блогеры, у которых красивые видео с водопадами, скалами и памятниками архитектуры собирали миллионы просмотров на Ютубе. Позднее их стали использовать для сельскохозяйственных работ (опрыскивание полей от вредителей), и для доставки грузов небольшого веса. Сейчас их активно используют для разведки позиций противника и сброса маленьких бомб, способных выводить из строя бронетехнику или группу пехотинцев.
 |
 |
 |
Трикоптер представляет собой наиболее простой вид мультикоптеров. Обычно он летит двумя винтами вперёд, а третий становится хвостовым. При этом передние винты имеют противоположные направления вращения лопастей. взаимно компенсируя реактивные закручивающие моменты. У хвостового винта пара отсутствует, и для компенсации его реактивного момента, ось вращения винта немного наклоняют в сторону, противоположную направлению закручивания. Это происходит при помощи сервопривода и тяги, используемой для стабилизации и управления положением аппарата по курсу.
Квадрокоптер стал наиболее распространенным видом мультикоптеров. Сейчас используются две схемы движения: схема «+» и схема «х». В плюсовой схеме один из роторов считается передним, противоположный ему задним, а оставшиеся пара роторов боковыми. В иксовой схеме передними считаются сразу два ротора, а противоположные им задними. При смещении вбок также используется пара роторов. Для схемы «+» используется более простой алгоритм управления винтами, чем для схемы «х». Но последняя имеет конструктивные преимущества и применятся чаще. При схеме «х» проще разместить фюзеляж, форма которого может быть вытянутой, а бортовая видеокамера получает более свободный обзор.
 |
 |
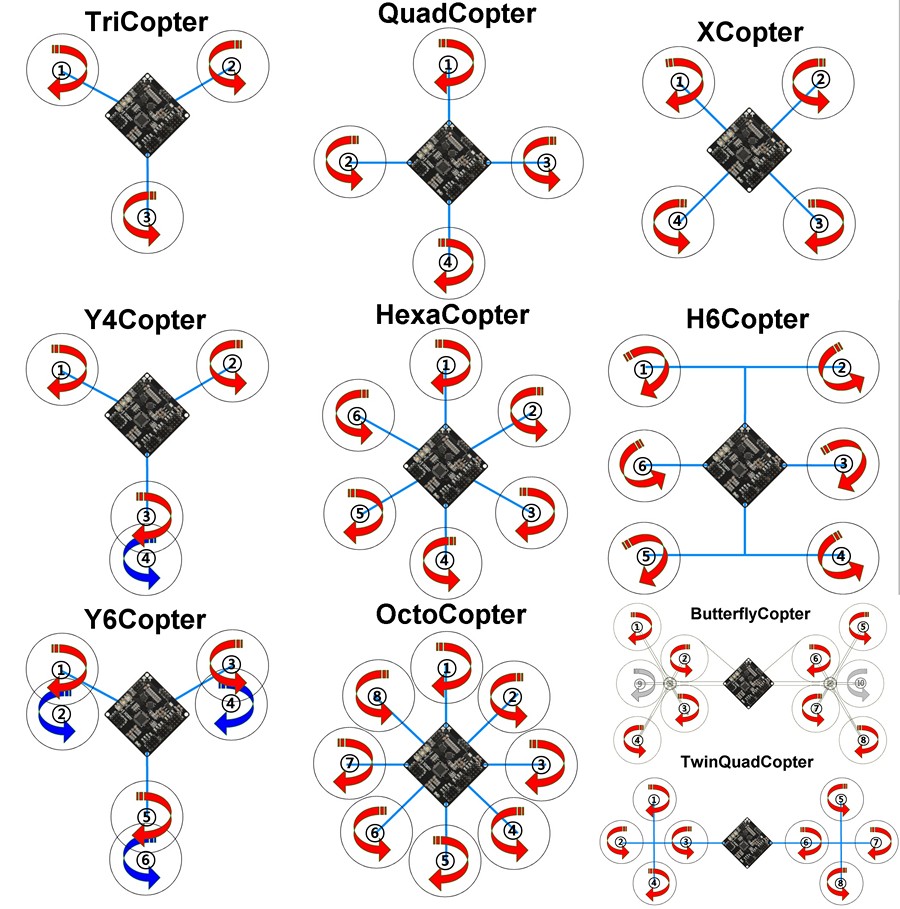 |
Гексакоптеры и октокоптеры, имеют уже по 6 и 8 роторов, обладая большей грузоподъёмностью. Вторым их плюсом стала возможность полёта при повреждении одного двигателя. Третьим плюсом стала меньшая вибрация, что критично для видеосъемки. Минусами стали более высокая цена и высокий расход заряда батареи.
БПЛА Аэростатического типа
 |
 |
 |
Беспилотники аэростатического типа или дирижабли (blimps) получают подъёмную силу благодаря архимедовой силе, действующей на оболочку, заполненную лёгким газом (обычно гелием).
Само слово дирижабль появилось от французского dirigeable – управляемый. Сейчас это аэростат с винтом (пропеллером или импеллером) и электрическим двигателем или ДВС, а также системой управления, позволяющей дирижаблю перемещаться в любом направлении, несмотря на воздушные потоки.
Плюсы дирижабля - большая грузоподъемность и максимальная дальность беспосадочных полётов. Также у них минимальный расход топлива, маленькая стоимость полёта и перевозки грузов. Габариты его внутренних помещений могут быть внушительными, при этом в воздухе он может находиться неделями. Дирижаблю не нужен аэродром, но необходима причальная мачта. Он способен полностью не приземляться, а повиснуть над землей, подобно вертолёту. Из минусов можно отметить небольшую скорость полёта и чувствительность к сильному ветру, который может не дать повиснуть над землей. Теоретически небольшие дирижабли можно использовать для позиции расчёта снайперов или станции подзарядки/перезарядки боевых дронов.
Беспилотные конвертопланы и гибридные схемы
 |
 |
 |
Существуют также гибридные винтокрылые аппараты, например, автожиры и конвертопланы, одновременно имеющие признаки как вертолётов, так и самолетов.
 Гибрид вертолёта и автожира Гибрид вертолёта и автожира |
 Гибрид вертолёта и автожира GT20 Gyrotrak Гибрид вертолёта и автожира GT20 Gyrotrak |
Автожир или гирокоптер, гироплан, ротаплан произошёл от англоязычных слов: autogiro, gyrocopter, gyroplane, rotoplane. При данной схеме в качестве крыла (или в дополнение к нему) стоит вращающийся винт.
Наподобие вертолета, автожиру несущий винт нужен для создания подъёмной силы. Но она основана на другом принципе. Несущий винт создаёт виртуальную плоскость, набегая на которую, потоки встречного воздуха, создают подъёмную силу. При этом в полёте несущий винт наклонён назад, против воздушного потока. А у вертолёта, наоборот, несущий винт наклоняется в сторону движения, поскольку создаёт одновременно и подъёмную, и горизонтальную пропульсивную силы одновременно. Также автожир имеет тянущий или толкающий маршевый винт (пропеллер), как у самолёта. Именно маршевый винт придаёт автожиру горизонтальную скорость.
Минус многих автожиров в неумении взлетать вертикально, а плюс в более скромных требованиях для разбега. Например, им требуется разбег для взлета не превышающий 10-50 м, при условии предраскрутки ротора, это ощутимо меньше, чем нужно самолётам. Другой плюс автожиров в посадке без пробега, либо с коротким пробегом (несколько метров). По манёвренности они немного уступают вертолётам, но ощутимо превосходят самолеты. Также автожир сложнее сбить, если для самолета критична потеря скорости, после которой он свалится в штопор, то автожир просто начнёт снижаться. Если отказывает мотор, то автожир не падает, а начинает снижаться (планировать), благодаря эффекту авторотации. У вертолёта после отказа двигателя, несущий винт тоже переходит в режим авторотации. Но происходит это не сразу, за эти несколько секунд успевают упасть обороты ротора, критически важные при вынужденной посадке. Для перевозки людей и животных автожиры гораздо безопаснее вертолётов и самолётов. В плане безопасности они близки к дирижаблям, при крушении которых жертв было всегда немного.
Многие модели автожиры летают со скоростью до 180 км/ч, соперничая с лёгкими вертолётами, но немного уступая лёгким самолетам. Расход топлива обычно не превышает 15 литров на 100 км при скорости 120 км/ч. В этом они проигрывают самолётам. По сравнению с вертолётами, их легче и дешевле обслуживать, ввиду отсутствия сложной трансмиссии. Также автожиры испытывают меньшую вибрацию, и могут летать при сильном ветре (до 20 м/с). Это делает их выгодными при транспортировке раненных, которым требуется максимальный покой. На сегодня автожиры выпускаются в обоих исполнениях (беспилотные и пилотируемые) по всему миру.
Конвертопланами (convertiplane, heliplane) называются аппараты с поворотными винтами, при взлёте и посадке они поднимают или опускают беспилотник, а в горизонтальном полёте тянут. Во время полёта подъёмная сила достигается при помощи крыльев. По сути это гибрид, являющийся аналогом вертолёта по взлету и посадке, и самолёта в горизонтальном полёте. Конвертопланы имеют большие винты, помогающие при вертикальном взлёте. Но в дальнейшем полёте они проигрывают по эффективности винтам самолёта, имеющим меньший диаметр.
Сами конвертопланы по конструкции делятся на 3 подкласса:
- Беспилотники с поворотными винтами (Tiltrotor).
- Модели с поворотным крылом (Tiltwing).
- БПЛА со свободным крылом (Freewing).
 |
 |
 |
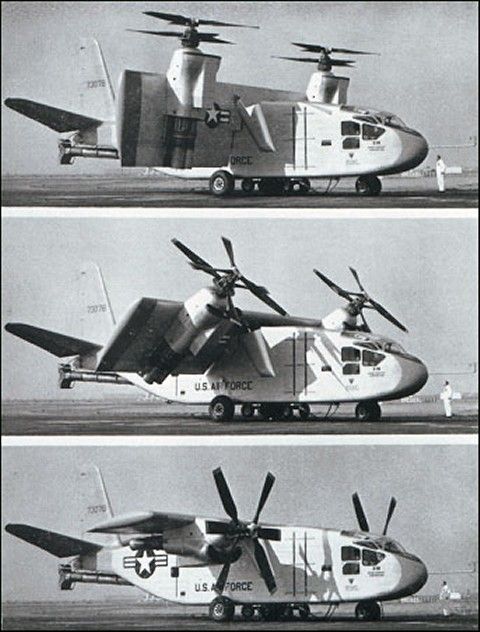
Конструктивная особенность конвертопланов с поворотными винтами (Tiltrotor) заключается в том, что поворачиваются гондолы с винтами и двигателями, а не сами винты. Их крылья имеют небольшой размах и остаются неподвижными. На фото приведены примеры БПЛА всех трёх типов.
 |
 |
 |
У моделей с поворотным крылом (Tiltwing) поворачивается всё крыло. Плюс данной схемы наглядно виден при вертикальном взлёте, когда крылья не закрывают воздушный поток от винтов, что ощутимо повышает их эффективность.
 |
 |
В конвертопланах со свободным крылом (Freewing) в разных фазах полёта отклоняются сами винты, создавая при этом вертикальную или горизонтальную тягу. Тем временем крылья свободно вращаются, перпендикулярно фюзеляжу. Они принимают вертикальное, горизонтальное или любое промежуточное положение под напором воздуха, создаваемого винтами. Плюсом данных беспилотников стала устойчивость полёта.
Во второй части статьи будет подробное описание именно боевых БПЛА, их возможностей в качестве разведчиков и боевых единиц. Рассмотрим, например, этого юркого малыша.
На что способен самый маленький военный БПЛА
Самый мелкий БПЛА Black Hornet Nano || Обзор
Лента материалов
Соблюдение Правил конференции строго обязательно!
Флуд, флейм и оффтоп преследуются по всей строгости закона!
Комментарии, содержащие оскорбления, нецензурные выражения (в т.ч. замаскированный мат), экстремистские высказывания, рекламу и спам, удаляются независимо от содержимого, а к их авторам могут применяться меры вплоть до запрета написания комментариев и, в случае написания комментария через социальные сети, жалобы в администрацию данной сети.