
Учёные разработали полноценную биогибридную руку, приводимую в движение настоящими мышцами

Биогибридные роботы, как следует из названия, представляют собой симбиоз биологических и небиологических компонентов. В качестве биологической составляющей могут выступать органические мышцы, растительные ткани или даже грибы, которые работают совместно с искусственными (металлическими, резиновыми или пластиковыми) материалами. Несмотря на значительный прогресс в разработке и функционировании небиологических элементов, поддержание жизнеспособности органической части всегда являлось серьезной проблемой. Именно это обстоятельство ранее ограничивало размеры и сложность машин, приводимых в движение биологическими мышцами, — как правило, они не превышали нескольких сантиметров в длину и обладали лишь одним рабочим суставом.
Профессор Токийского университета Сёдзи Такеути, возглавивший исследовательскую группу, заявил, что «масштабирование биогибридных роботов сопряжено с рядом трудностей, включая недостаточную сократительную силу лабораторно выращенных мышц, риск омертвения (некроза) в толстых мышечных тканях и проблему эффективного соединения биологических и искусственных компонентов». Тем не менее, команде под руководством Такеути удалось разработать полноразмерную, восемнадцатисантиметровую биогибридную руку, анатомически схожую с человеческой и оснащенную пятью пальцами, каждый из которых приводится в движение выращенными в лабораторных условиях человеческими мышцами.
реклама
Одной из ключевых задач при разработке подобных биогибридных систем является обеспечение долгосрочной жизнеспособности мышечных тканей. Среди множества препятствий на пути к созданию крупномасштабных биороботов проблема некроза, вероятно, была наиболее сложной. Традиционный метод выращивания мышц в лабораторных условиях предполагает использование жидкой питательной среды, обогащенной кислородом, для культивирования мышечных клеток на чашках Петри или гелевых матрицах. В случае небольших и плоских мышечных культур питательные вещества и кислород легко достигают каждой клетки.
Однако при попытке увеличить толщину мышц для повышения их силы клетки, расположенные в глубине ткани, оказываются лишены доступа к питанию и кислороду, что приводит к их гибели в результате некроза. В живых организмах эта проблема решается благодаря развитой сосудистой сети, однако выращивание искусственных кровеносных сосудов в лабораторно выращенных мышцах до сих пор остается невыполнимой задачей. Чтобы обойти проблему некроза, команда Такеути разработала оригинальный подход, который сами исследователи назвали «заворачиванием суши».
Суть метода заключалась в следующем: сначала на чашке Петри выращивались тонкие и плоские мышечные волокна, расположенные параллельно друг другу. Такая структура обеспечивала доступность питательных веществ и кислорода для всех клеток, что способствовало формированию крепких и здоровых мышц. После того как волокна достигали необходимого размера, их сворачивали в трубочки, получившие название MuMuTAs (многочисленные мышечные тканевые активаторы). Профессор Такеути поясняет: «MuMuTAs выращивались путем культивирования тонких мышечных листов и их последующего сворачивания в цилиндрические пучки, что позволило оптимизировать сократительную способность при сохранении эффективной диффузии кислорода».
реклама
Сократительные действия MuMuTAs инициировались подачей электрических сигналов через электроды, закрепленные на обоих концах мышечной трубки. В зависимости от того, какие волокна сокращались, «мышечные роллы» могли сгибаться или вращаться. Сила сокращения регулировалась изменением величины приложенного напряжения.
 После успешного выращивания и тестирования MuMuTAs исследователи использовали пять таких активаторов для управления многосуставными пальцами роботизированной руки.
После успешного выращивания и тестирования MuMuTAs исследователи использовали пять таких активаторов для управления многосуставными пальцами роботизированной руки.
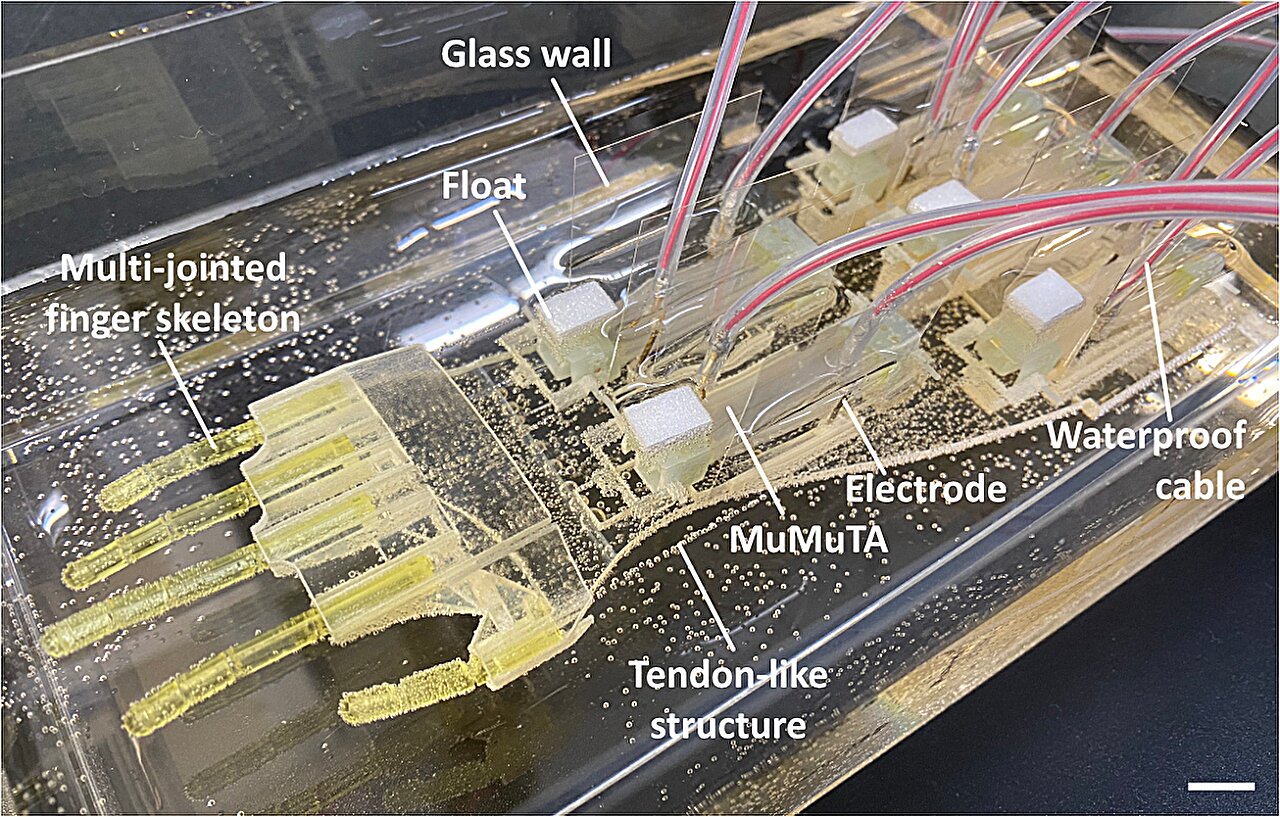
Следует отметить, что биогибридная рука, изготовленная из пластика методом 3D-печати, во время испытаний находилась в жидкой среде. Каждый из пяти пальцев имел три сустава и приводился в движение тонким тросом, соединенным с одним из пяти MuMuTAs, расположенных в предплечье. Для предотвращения взаимного влияния электрических полей MuMuTAs были помещены в отдельные стеклянные контейнеры, что обеспечивало их независимое управление. С одной стороны MuMuTAs крепились к пластиковой конструкции руки, а с другой — соединялись с тросами, управляющими движением пальцев.
Благодаря избирательному сокращению MuMuTAs рука могла выполнять различные движения, имитируя жесты, используемые в игре «камень, ножницы, бумага», а также манипулировать небольшими предметами, например, лабораторной пипеткой. Эти возможности стали доступны благодаря значительной силе, развиваемой MuMuTAs по сравнению с другими лабораторно выращенными мышечными системами. Каждый активатор генерировал сократительную силу в 8 миллиньютонов, что приблизительно достаточно для поднятия небольшой канцелярской скрепки. Кроме того, разработанный метод «заворачивания суши» способствовал увеличению срока службы мышц: после испытаний MuMuTAs можно было развернуть, обеспечив клеткам доступ к кислороду и питательным веществам.
Несмотря на впечатляющие результаты, исследователи столкнулись и с определенными ограничениями. Во-первых, пальцы могли двигаться только в одном направлении: мышцы сокращались в ответ на электрический сигнал, но возвращение в исходное положение происходило лишь за счет плавучести материала. (В естественных условиях для возвращения суставов в исходное положение обычно используется вторая группа мышц-антагонистов.) Профессор Такеути предложил два возможных решения этой проблемы. Первое заключается в использовании эластичного материала в конструкции суставов, что обеспечит более быстрое возвращение пальцев в исходное положение. Второе решение — добавление еще пяти антагонистических MuMuTAs, что позволит реализовать двунаправленное движение, подобно тому, как это устроено в настоящей человеческой руке.
реклама
Второй проблемой стала зависимость MuMuTAs и всей роботизированной руки от жидкой среды. «Для перехода к работе в воздушной среде потребуется разработка искусственных систем доставки питательных веществ и разработка защитных оболочек, способных поддерживать жизнеспособность тканей вне жидкой среды», — поясняет Такеути.
Однако, пожалуй, наиболее очевидным ограничением использования биологических мышц в роботах оставалась их утомляемость. После примерно десяти минут работы биогибридная рука начинала терять свою функциональность.
Исследователи зафиксировали признаки усталости в MuMuTAs во время испытаний, направленных на определение максимальной силы, которую мышцы могли генерировать в ответ на увеличение напряжения. При интенсивной стимуляции MuMuTAs сократительная сила мышц заметно снижалась после нескольких циклов. Способность к сокращению восстанавливалась примерно через час отдыха руки в питательной среде. Примечательно, что даже выращенные в чашках Петри мышцы никогда не подвергались такой интенсивной нагрузке, которая была бы характерна для мышц в живом организме. В целом, их сила оказалась относительно невысокой.
Достигнутая командой Такеути сократительная сила лабораторно выращенных мышц составляла 0,7 миллиньютона на квадратный миллиметр, что является неплохим показателем по сравнению с другими аналогичными разработками. Однако по сравнению с живыми мышцами, способными генерировать около 6 миллиньютонов на квадратный миллиметр, они выглядели довольно слабыми. Профессор Такеути считает, что решение может быть таким же, как и для обычных мышц: тренировки.
«Подобно естественным мышцам, искусственно выращенные мышцы могут получить пользу от тренировок, в результате которых многократные сокращения со временем повышают их выносливость и силу», — предполагает Такеути. Другим предложенным командой вариантом является использование химических факторов роста для стимуляции развития мышечной ткани.
реклама
Результаты работы профессора Такеути над созданием биогибридной роботизированной руки были опубликованы в журнале Science Robotics.
Лента материалов
Соблюдение Правил конференции строго обязательно!
Флуд, флейм и оффтоп преследуются по всей строгости закона!
Комментарии, содержащие оскорбления, нецензурные выражения (в т.ч. замаскированный мат), экстремистские высказывания, рекламу и спам, удаляются независимо от содержимого, а к их авторам могут применяться меры вплоть до запрета написания комментариев и, в случае написания комментария через социальные сети, жалобы в администрацию данной сети.